Overview
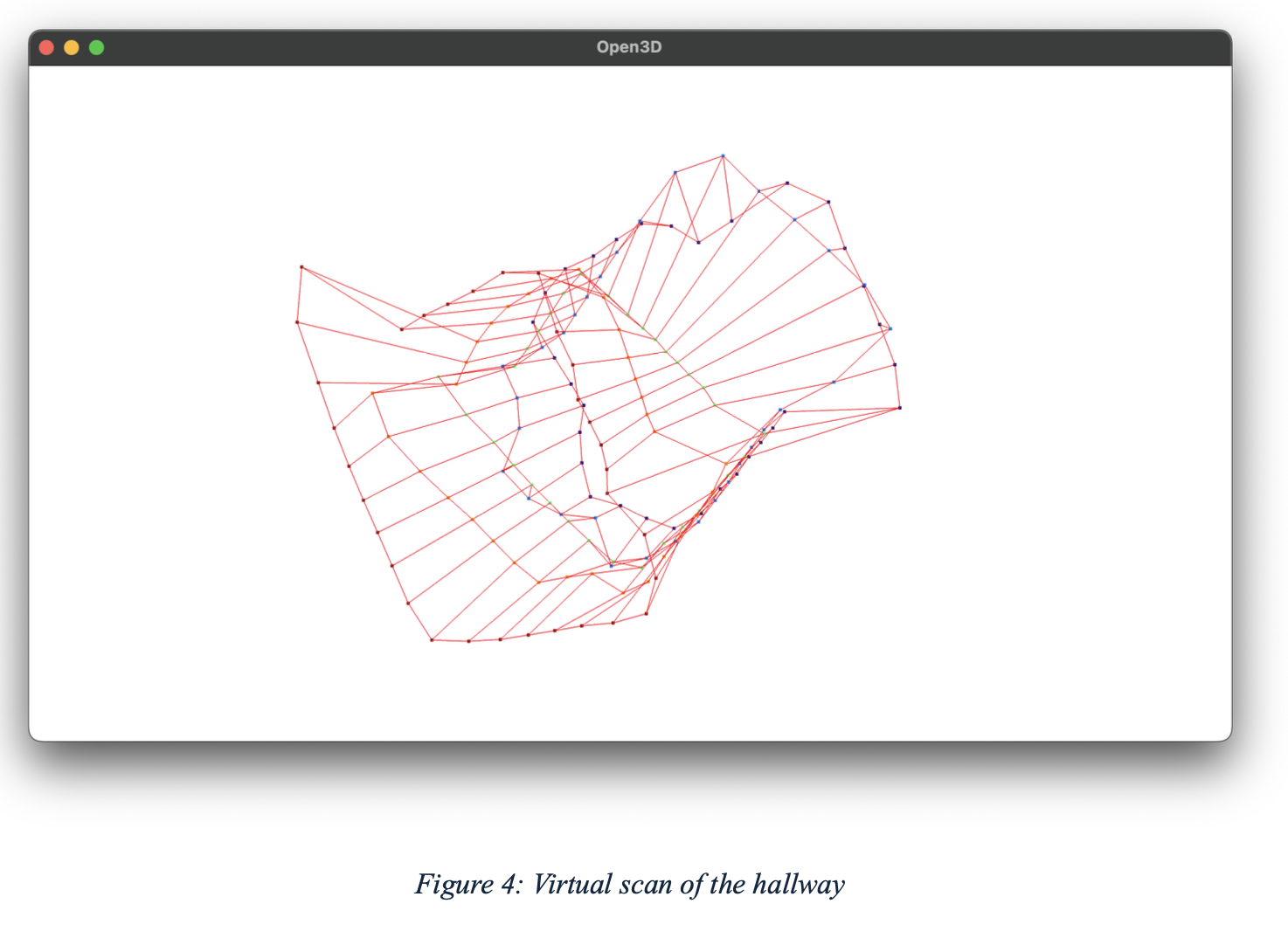
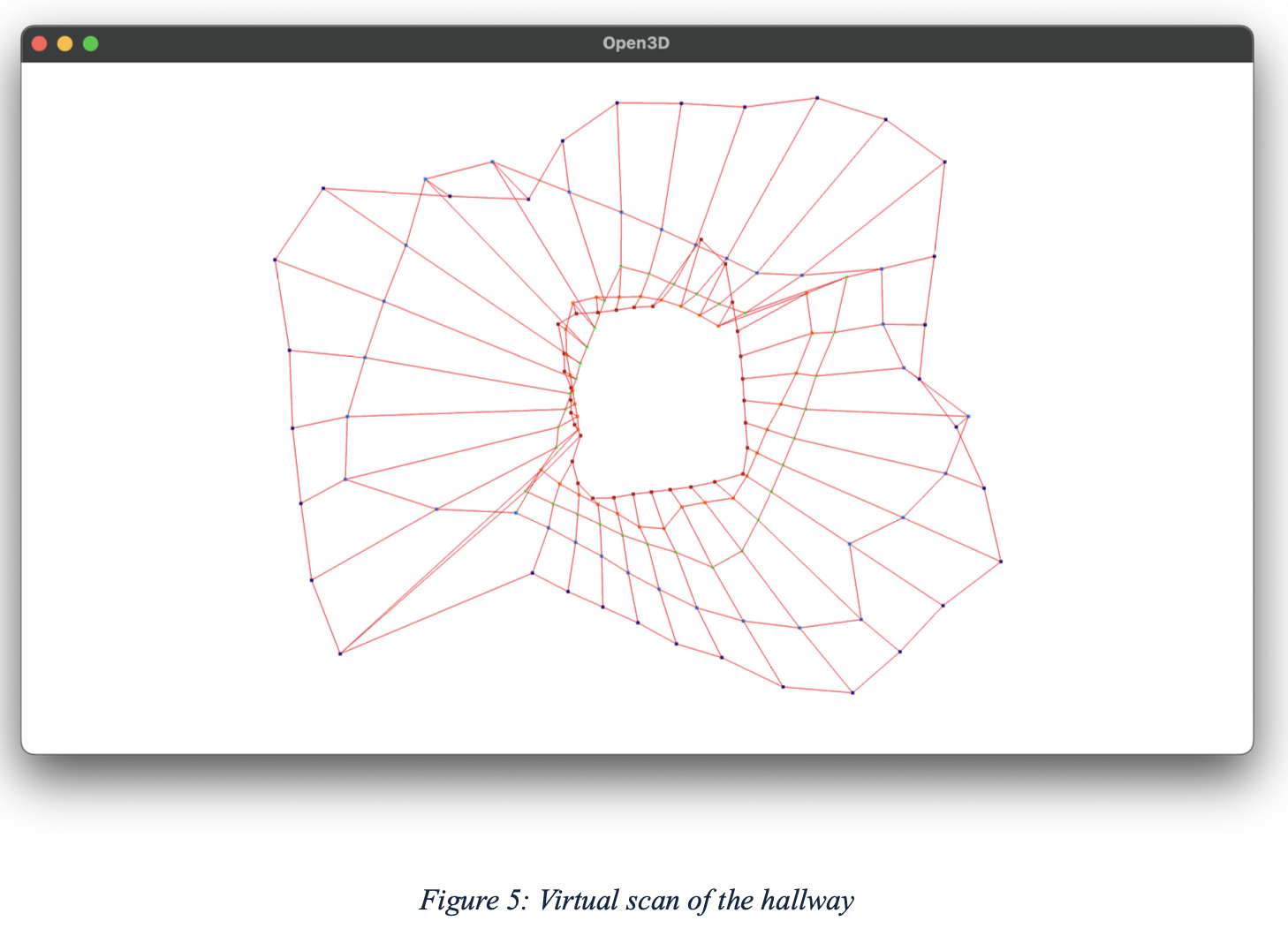
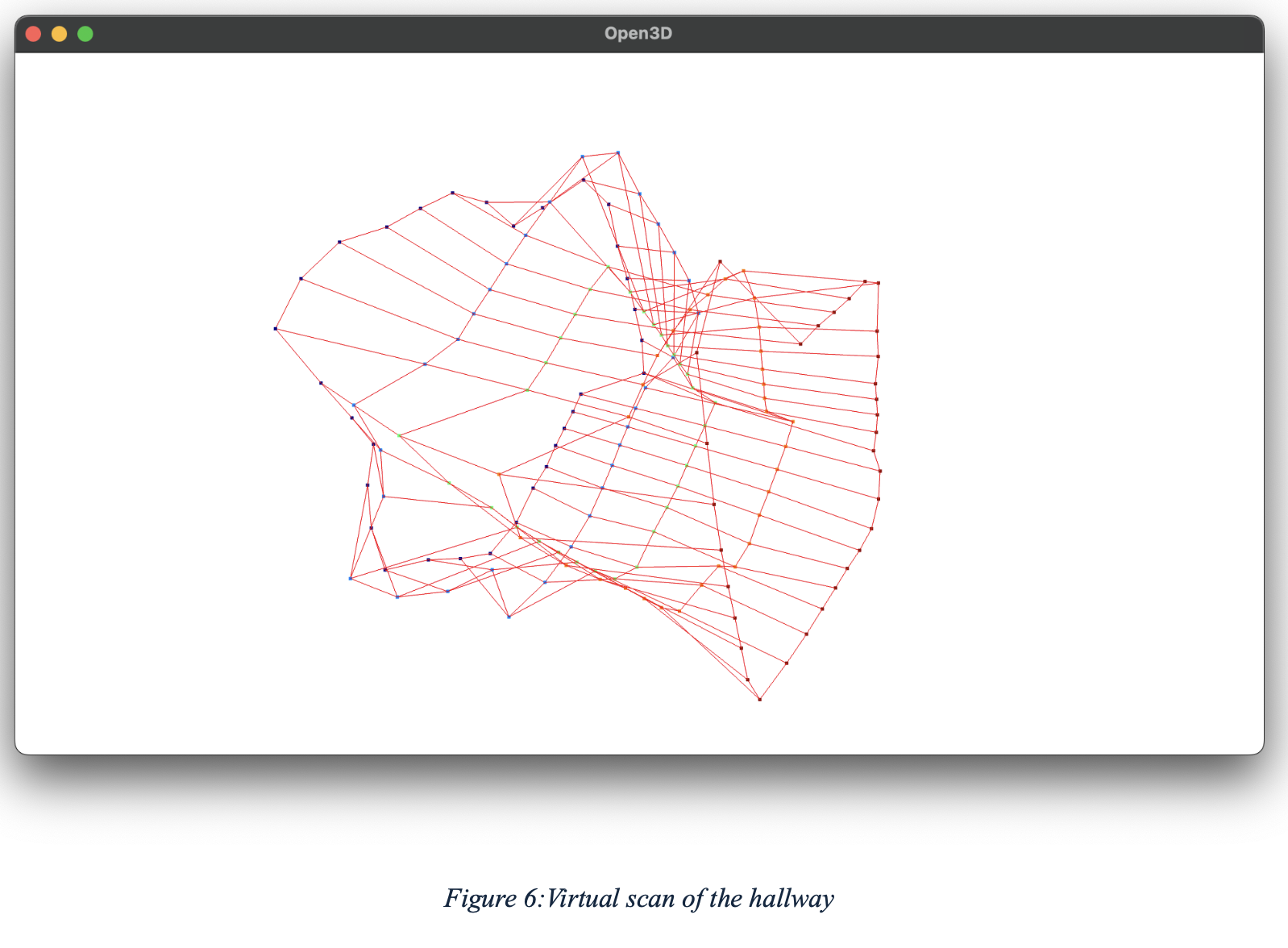
The Spatial Mapping System uses a time-of-flight (ToF) sensor that is connected to a stepper motor which rotates a full 360 degrees. This motor is then mounted into a housing which holds all the components to run the system alongside making it easier to collect readings. The collected data is then and run in Python via Open3D which creates a full digital scan in all three planes.
Tools & Technologies
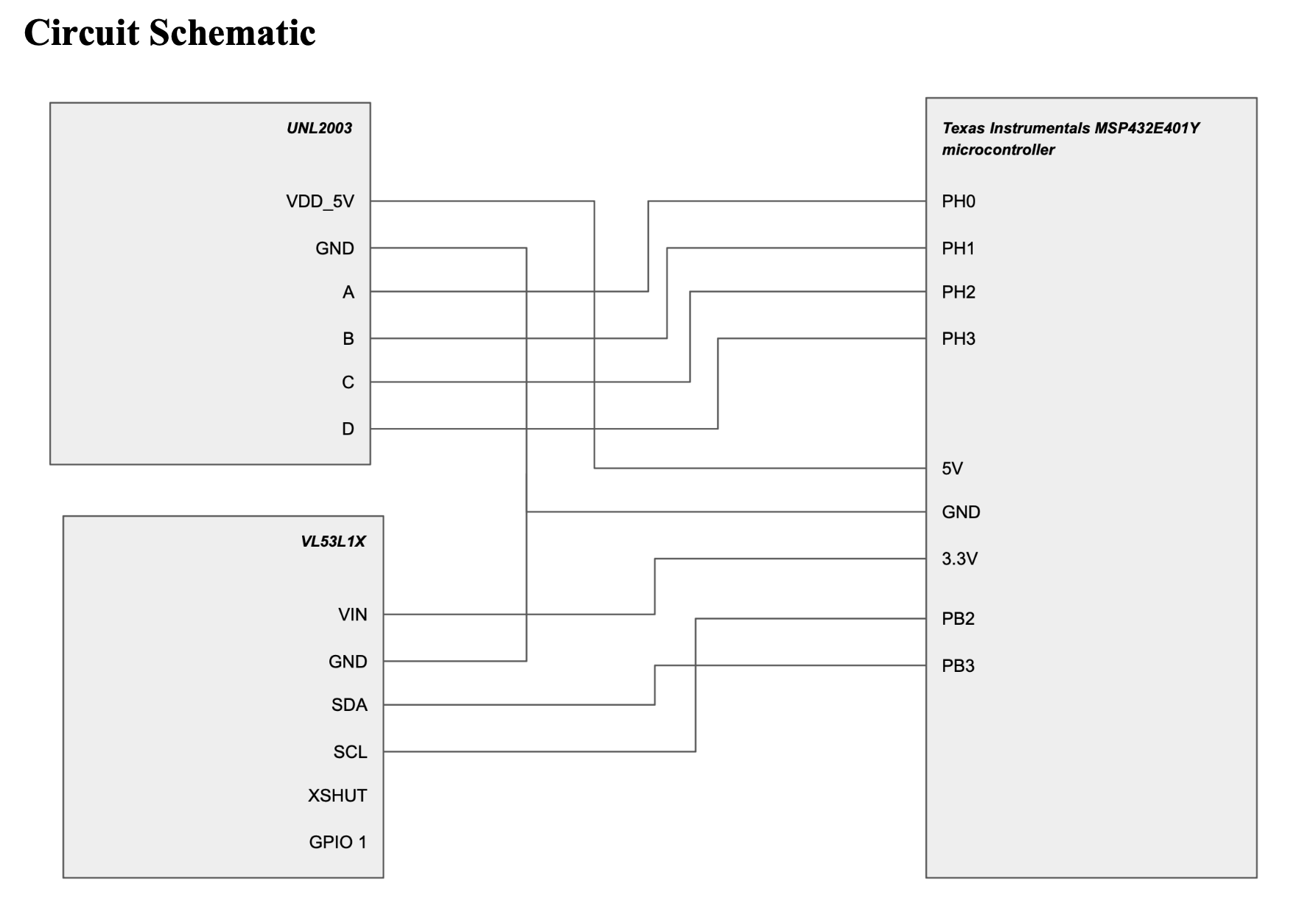
- Texas Instrumentals MSP432E401Y microcontroller
- Time-of-Flight (ToF) Sensor – VL53L1X
- Stepper Motor – 28BYJ-48 with ULN2003 Driver
- Real-time 3D visualization using Python & Open3D
- I2C & UART Communication
- Circuit Design
Challenges
One of the main challenges was ensuring accurate readings from the ToF sensor while it was rotating. This meant that the housing was attached properly and that no wires would get tangled or caught in the motor's movement and disrupt the sensor. Additionally, integrating the stepper motor with the microcontroller required careful timing and control logic to ensure smooth operation. It also required a strong understanding of how the I2C and UART protocols worked to ensure that the data was being sent and received correctly.
Gallery